الوضع الليلي


 11:1:3
11:1:3  2026-01-19
2026-01-19  1117
1117

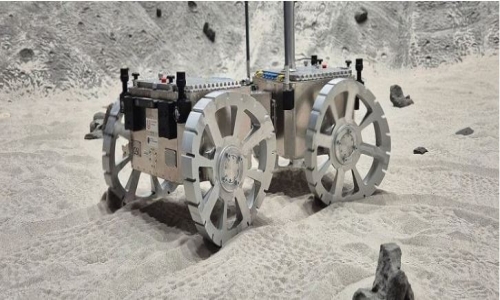
Labor shortages in agriculture are driving growing interest in robotic systems that can automate harvesting. Yet some crops remain especially challenging for machines. Tomatoes, for example, grow in clusters, meaning robots must identify and remove only the ripe fruit while leaving unripe tomatoes attached to the vine. Doing this reliably requires careful judgment and precise control.
To address this problem, Osaka Metropolitan University Assistant Professor Takuya Fujinaga from the Graduate School of Engineering developed a method that allows robots to assess how easy each tomato is to harvest before attempting to pick it.
Robots struggle with selective harvesting
Fujinaga’s approach combines image recognition with statistical analysis to determine the best direction from which to harvest each tomato. The system analyzes visual information about the fruit itself, the shape and position of its stems, and whether the tomato is partially hidden by leaves or other parts of the plant. By weighing these factors, the robot can make more informed control decisions and select the approach that offers the highest chance of a successful harvest.
The model represents a shift in focus from the traditional ‘detection/recognition’ model to what Fujinaga calls a ‘harvest‑ease estimation’.
“This moves beyond simply asking ‘can a robot pick a tomato?’ to thinking about ‘how likely is a successful pick?’, which is more meaningful for real‑world farming,” he explained.
Estimating harvest success, not just detection
In trials, Fujinaga’s system achieved a successful harvest rate of 81%, significantly outperforming expectations. Around one quarter of those successful picks involved tomatoes collected from the right or left side after earlier attempts from the front had failed, indicating that the robot adjusted its strategy when it encountered difficulty.
The findings underscore how complex robotic fruit harvesting can be, with factors such as clustered growth, stem shape, surrounding leaves, and visual obstruction all playing critical roles.
“This research establishes ‘ease of harvesting’ as a quantitatively evaluable metric, bringing us one step closer to the realization of agricultural robots that can make informed decisions and act intelligently,” he said.
Toward collaborative human-robot farming
Fujinaga sees a future where robots will be able to independently determine whether crops are ready for harvest. “This is expected to usher in a new form of agriculture where robots and humans collaborate,” he explained. “Robots will automatically harvest tomatoes that are easy to pick, while humans will handle the more challenging fruits.”
Reality Of Islam |
|
Modern comp

With im
A Sahara De
 9:3:43
2018-11-05
9:3:43
2018-11-05
10 benefits of Marriage in Islam
7:5:22
2019-04-08
benefits of reciting surat yunus, hud &
9:45:7
2018-12-24
advantages & disadvantages of divorce
11:35:12
2018-06-10
6:0:51
2018-10-16
6:14:17
2018-06-21
8:19:41
2018-06-21
12:47:1
2022-12-20
al-hussain (peace be upon him)
10:18:1
2022-09-21
bahlool & the throne of haroun rashid
8:20:35
2018-06-21
7:26:19
2022-04-08
10:35:40
2022-05-26
5:41:46
2023-03-18
| LATEST |
 HOME
HOME